Biorobotics Laboratory (BioRob)

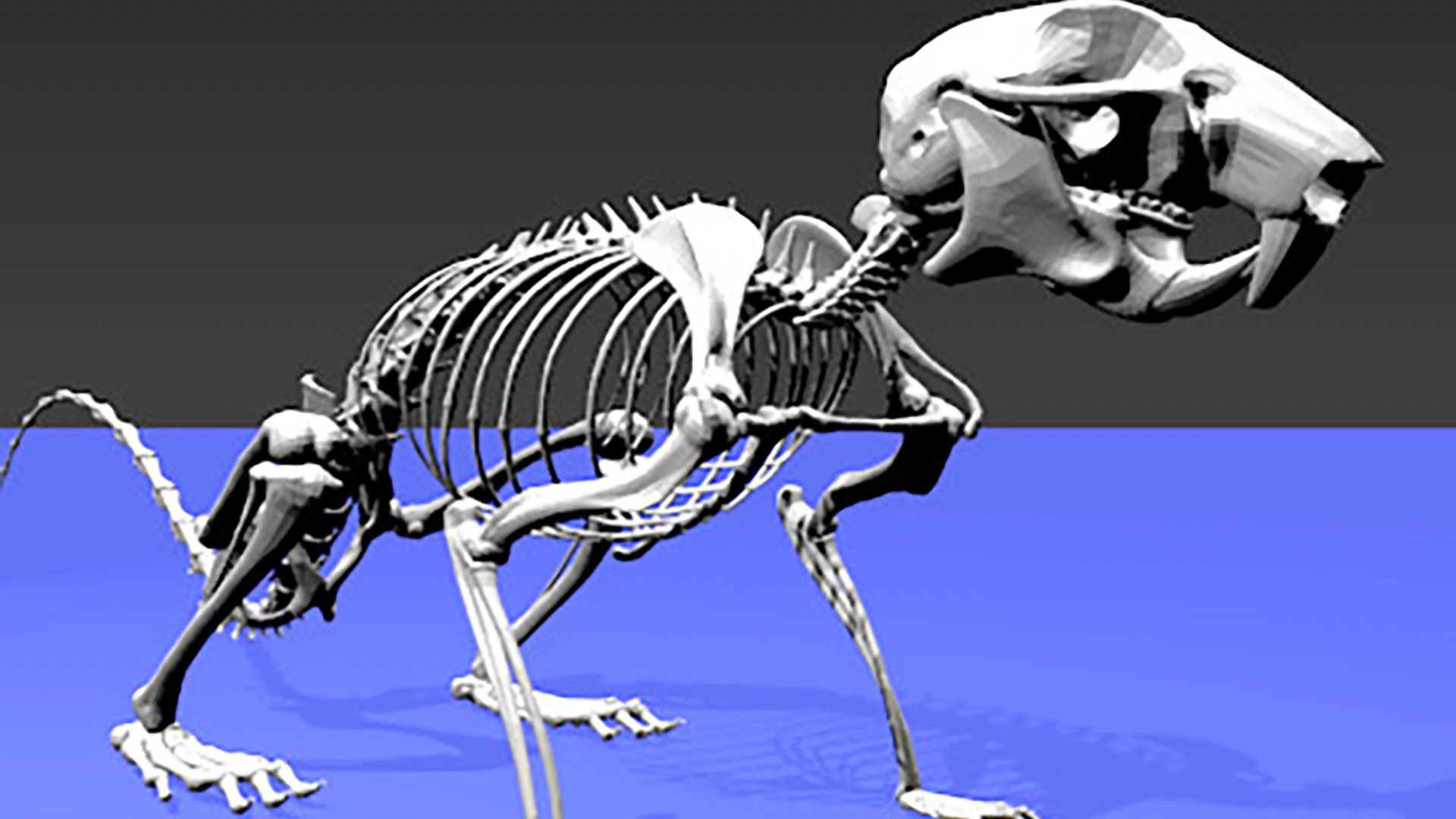
The Biorobotics Laboratory (BioRob in short) is part of the Institute of Bioengineering in the School of Engineering at the EPFL (also co-affiliated with the Institute of Mechanical Engineering). We work on the computational aspects of locomotion control, sensorimotor coordination, and learning in animals and in robots. We are interested in using robots and numerical simulation to study the neural mechanisms underlying movement control and learning in animals, and in return to take inspiration from animals to design new control methods for robotics as well as novel robots capable of agile locomotion in complex environments. We are also interested in rehabilitation robotics, e.g. exoskeletons, and in restoring locomotion.
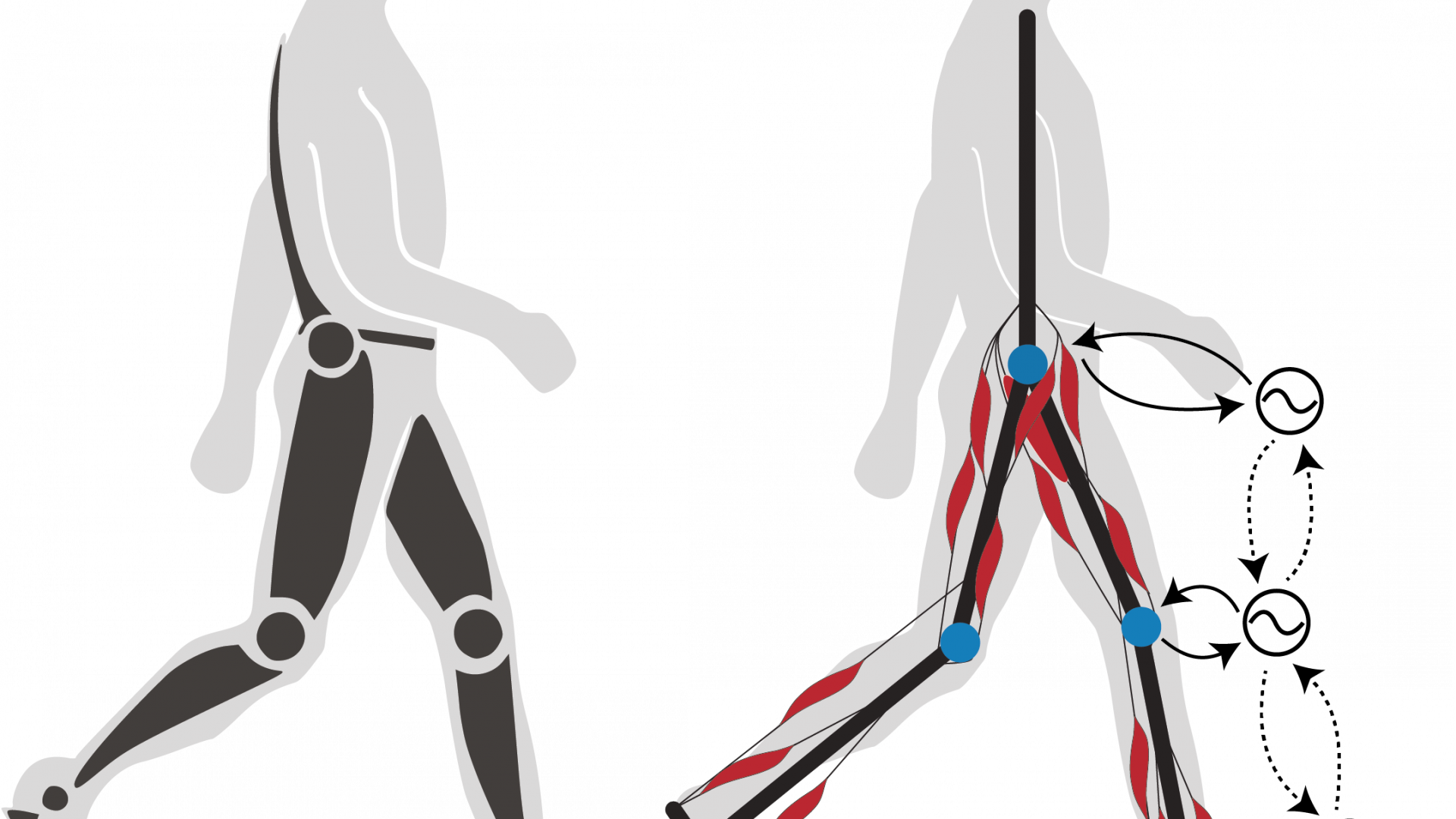
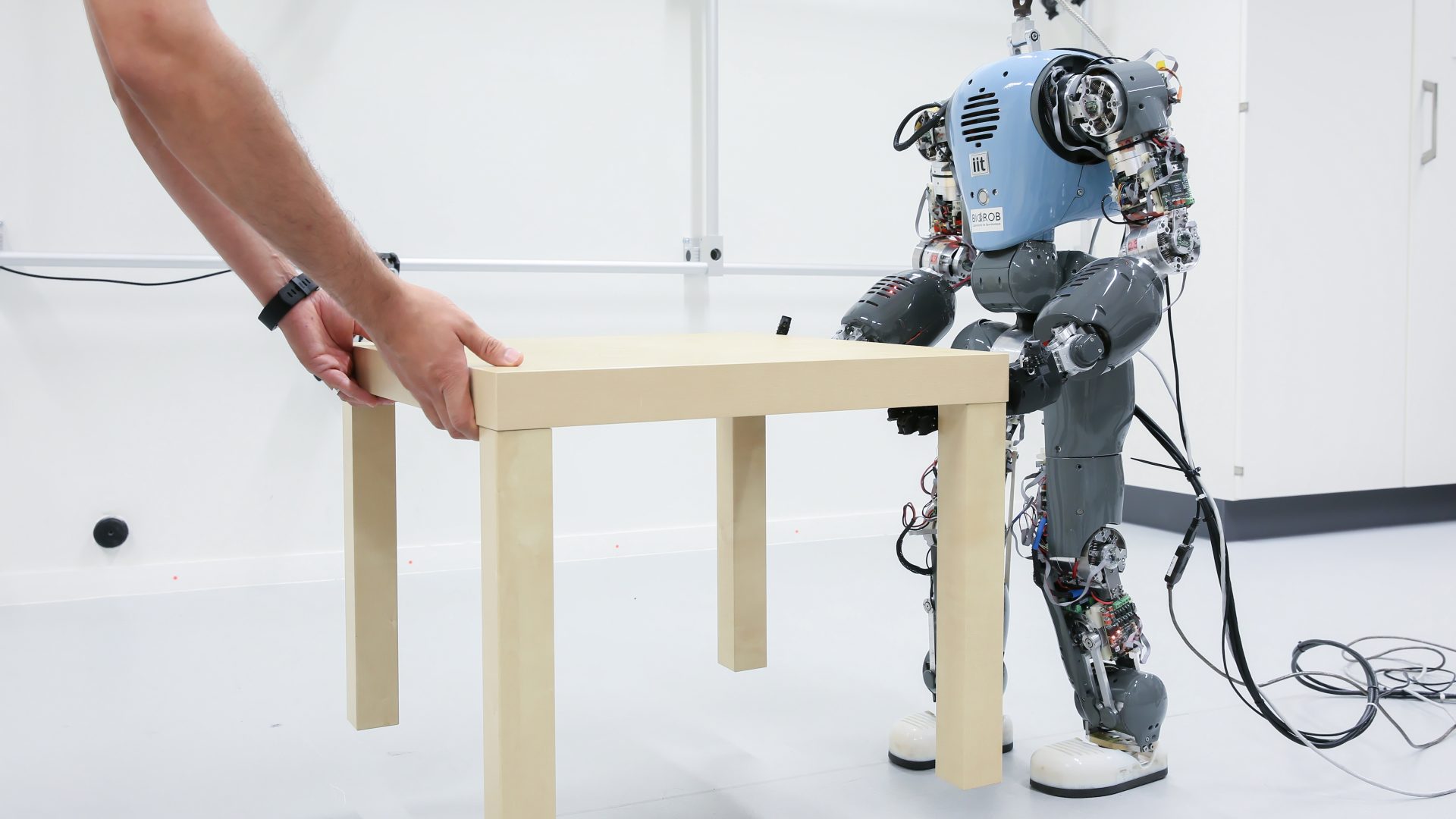
Our research interests are therefore at the intersection between robotics, computational neuroscience, biomechanics, nonlinear dynamical systems, and machine learning. We carry out research projects in the following areas: neuromechanical simulations of locomotion and movement control, systems of coupled nonlinear oscillators for locomotion control, design and control of amphibious, legged, and reconfigurable robots, control of humanoid robots and of exoskeletons. See the Research pages for more details and follow us on Twitter. And see also robotics labs at EPFL.
BioRob’s Research Topics



Funding and Collaborative Projects
Our research is funded by the Swiss National Science Foundation, the European Research Council (ERC), the European Commission, HBP, HFSP, and the EPFL. Previous fundings came from the European Space Agency, the Swiss Commission for Technology and Innovation (CTI), the Swiss SystemsX initiative in Systems Biology, the Swiss NanoTera initiative, the French Ministère de la Recherche et de la Technologie, and Microsoft Research Cambridge.
Biorobotics Laboratory participates to the following national or international projects:
- Salamandra, ERC Synergy project.
Previous projects: Robotics-inspired biology, HFSP, SimGait, Sinergia Project from the Swiss National Science Foundation, Human Brain Project, Neurorobotics Platform, TERRINet (EU project, H2020), Swiss National Centre of Competence in Research (NCCR) in Robotics, Symbitron (EU project, FP7), Walk-man (EU project, FP7), Envirobot (Nano-Tera), AMARSi (EU project, FP7), Lampetra (EU project, FP7), LOCOMORPH (EU project, FP7), ANGELS (EU project, FP7), EVRYON (EU project, FP7), RobotCub (EU project, FP6), COGIMON (EU project, H2020).